


Tuto 03 : J’optimise mes vitesses de déplacement avec le robot Geek Junior

Tu vas surement te rendre compte que lors de ses déplacements en ligne droite, ton robot ne respecte pas justement cette ligne droite. C’est très énervant et frustrant. Pourtant ceci s’explique très facilement.
Pourquoi ton robot ne va pas tout droit ?
Plusieurs raisons peuvent expliquer que ton robot n’en fait qu’à sa tête et part de travers.
- Tu fais rouler ton robot sur du parquet ou du carrelage et les joints font dévier le robot Geek Junior.
- Les caoutchoucs des roues sont sales et la gomme n’accroche pas bien sûr le sol.
- Une des roues n’est pas très bien vissée sur le moteur et ne se trouve pas perpendiculaire au sol.
- Une des piles n’est pas au top de sa forme et les moteurs ne sont alors pas alimentés correctement.
Les réglages pour optimiser
les déplacements de ton robot
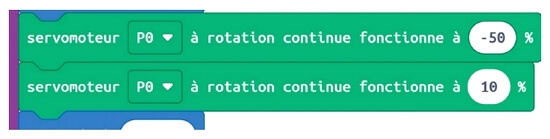
Après avoir vérifié toutes ces petites causes, tu auras surement à modifier la vitesse de rotation des moteurs afin d’avoir un fonctionnement optimal :
Par exemple pour un déplacement en ligne droite :
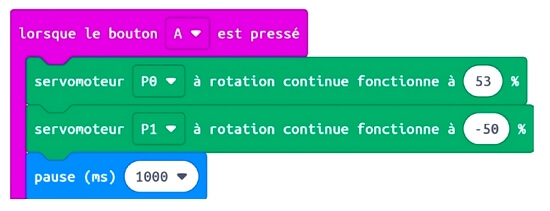
D’autre part, tu as surement remarqué dans la précédente activité que lors d’un virage à gauche ou à droite, le changement de direction était un peu brutal. Pour rendre ceci plus doux, il convient d’alimenter un peu le moteur de la roue intérieure :
Un petit challenge
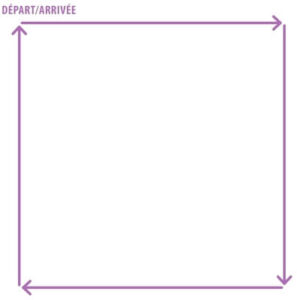
Et si tu te lançais un petit défi? Tu verras que celui-ci est plus dur qu’il n’y parait. Essaie de programmer ton robot afin qu’il réalise le parcours suivant : un carré de côté de 1 mètre.
Ton robot doit partir et revenir au même endroit. Bonne chance!!!
- Tous les fichiers pour tous les tutoriels de ce cahier d’activités sont disponibles au téléchargement à cette adresse : https://bit.ly/robotgeekjunior.