


Test du robot Codey Rocky et de son mode suiveur de ligne(s)
Après un premier article de découverte du nouveau robot Codey Rocky de Makeblock, allons un peu plus dans le détail avec son mode de fonctionnement “suiveur de ligne”.
Poursuivant ma découverte de ce sympathique robot qu’est le Codey Rocky, j’ai voulu tester le mode suiveur de ligne. J’ai donc ouvert le programme exemple fourni avec mBlock 5.
Après l’upload du programme dans le Codey, passons aux essais :
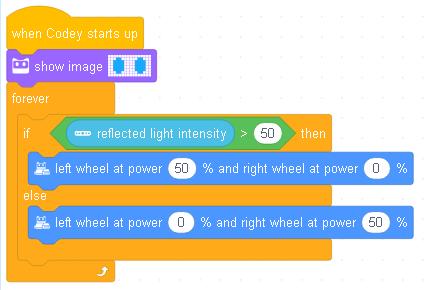
Pas super tout de même. J’ai donc modifié le programme ainsi pour avoir un fonctionnement plus satisfaisant :
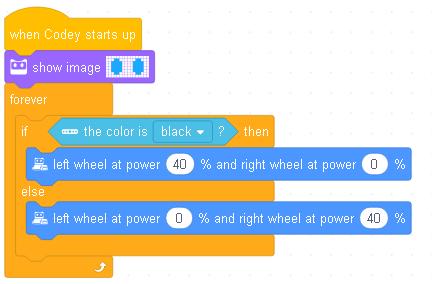
C’est tout de même nettement mieux. Mais, il est sûrement possible d’améliorer ce petit script afin d’éviter que le Codey Rocky se tortille comme un vers.
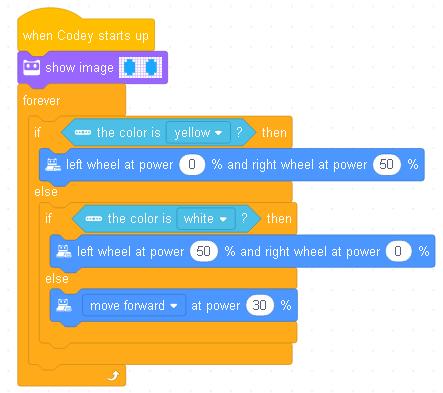
Ce robot ne posséde qu’un seul capteur suiveur de ligne. Alors, comment le faire se recentrer s’il quitte le tracé ? Voici la méthode que j’ai utilisé. J’ai décidé d’encadrer la ligne noire de 2 autres lignes de couleurs blanche et jaune et de faire se recentrer le Codey Rocky quand il détecte ces 2 couleurs :
Allez hop, une petite vidéo :
Une chose de “rigolote”. Si l’éclairage est trop important, il doit alors se produire des reflets sur ma piste (je pense que c’est ça). Du coup, le robot va se promener hors piste :
Je poursuis donc la découverte de ce mignon petit robot avec l’aide précieuse (si si) de mes élèves qui sont toujours très imaginatifs pour trouver des tests vicieux à faire faire au robot. De plus, l’idée de pouvoir améliorer cet objet avec des capteurs de la gamme Neuron est séduisante sur le papier.
A bientôt pour de nouveaux tests.